 [4] - Конференция antigreenlight.ru")
Данный репозиторий представляет собой наглядную шпаргалку по основным темам в области Backend-разработки. Весь материал разбит на главы, которые включают в себя разные темы. В каждой теме можно выделить три основные части:. Изначально Интернет разрабатывался для военных. Но вскоре он стал внедряться в учреждения образования университеты , а затем его смогли использовать частные компании, которые начали организовывать сети провайдеров, предоставляющие услуги доступа в Интернет обычным гражданам.













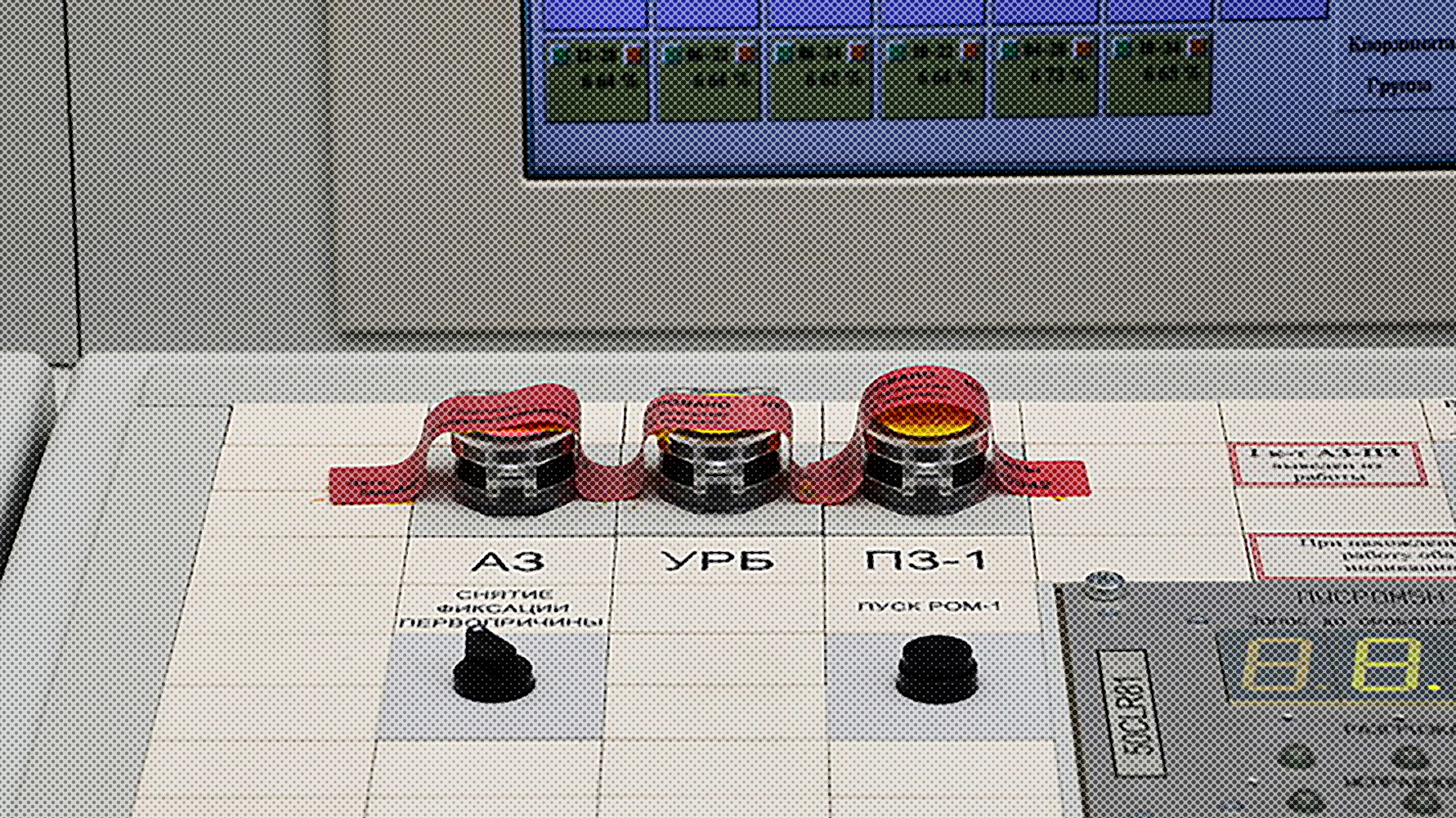
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись. Если вы сомневаетесь, что вам это подходит, повторите проект попроще, например робота для езды по линии.






Главная iXBT. Последние темы. Правила конференции FAQ по конференции.





Похожие статьи
- Садовые ландшафты своими руками фото - Ландшафтный дизайн дачного участка (106 фото стили)
- Котел отопления частного дома своими руками
- Гараж квартира - Недвижимость Дмитров квартира, дом, земельный участок
- Пол своими руками из досок - Деревянный пол в частном доме своими руками : как сделать дощатый пол?